滁州品質搬運機械手
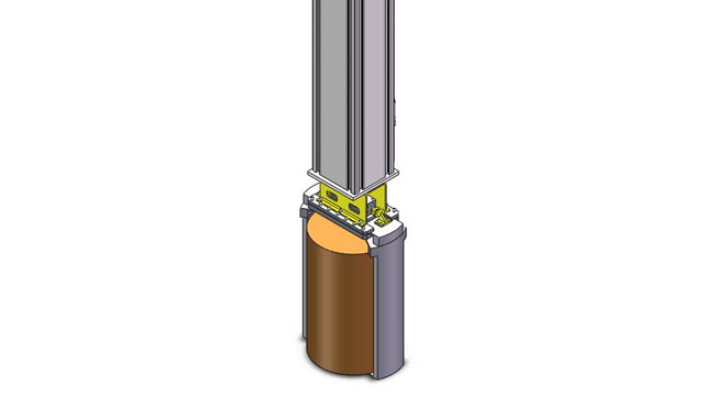
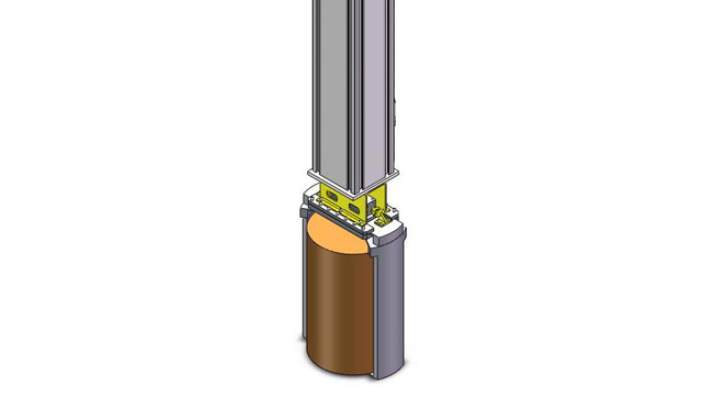
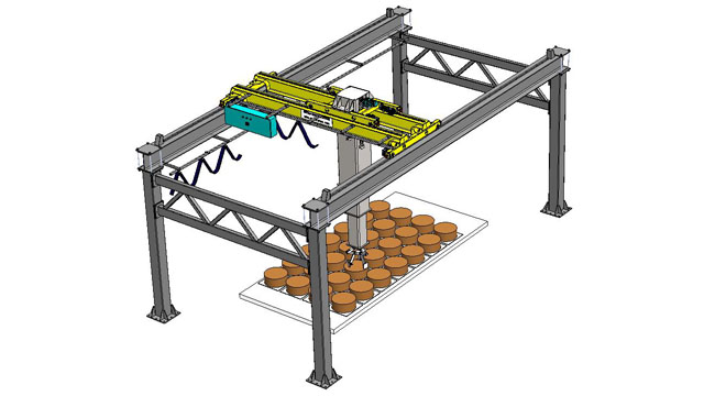
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、 導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。三坐標搬運機械手,PLC控制。南京高銳特起重機生產。滁州品質搬運機械手
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長; 3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。滁州品質搬運機械手智能三坐標搬運機械手,南京高銳特起重機有限公司。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。 二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。 三、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、 Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2. 連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三坐標搬運機械手,自動化程度高,南京高銳特起重機械有限公司生產。
一、搬運機械手簡介:三坐標搬運機械手由鋼結構架、X軸運行機構、Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成。二、產品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應;2.連續工作時間長;3.定位精度可達0.02mm;4.重型工件的碼垛、 上下料及工件的翻轉(如果需要)的搬運;5.各機構均設有限位裝置(機電雙限位)、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,防超程裝置等;7.誤操作保護裝置。三坐標搬運機械手,氣動抓手,PLC控制。南京高銳特起重機生產。連云港智能搬運機械手
三坐標搬運機械手,PLC控制。南京高銳特生產。滁州品質搬運機械手
一、搬運機械手產品構成:三坐標搬運機械手由鋼結構架、X軸運行機構、 Y軸運行機構、Z軸升降機構、抓取機械手、導電系統及控制系統等組成;X軸方向運行機構,采用齒輪細條傳動,傳感器檢測元件+機械限位;Z軸方向運行機構,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,傳感器檢測元件+機械限位;Y軸方向升降機構,采用帶式傳動,傳感器檢測元件+機械限位;氣動抓取機械手,采用雙爪氣動動力裝置,實現機械手的開閉,爪指采用內爪式,傳感器檢測元件+機械限位;控制系統,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,發送指令給個執行元件按既定動作去執行。滁州品質搬運機械手
南京高銳特起重機械有限公司專注技術創新和產品研發,發展規模團隊不斷壯大。公司目前擁有專業的技術員工,為員工提供廣闊的發展平臺與成長空間,為客戶提供高質的產品服務,深受員工與客戶好評。公司以誠信為本,業務領域涵蓋起重輸送機械,自動起重輸送,智能起重輸送,電動葫蘆,我們本著對客戶負責,對員工負責,更是對公司發展負責的態度,爭取做到讓每位客戶滿意。公司深耕起重輸送機械,自動起重輸送,智能起重輸送,電動葫蘆,正積蓄著更大的能量,向更廣闊的空間、更寬泛的領域拓展。
- 上海品質空中穿梭車 2025-03-22
- 南通品質空中穿梭車 2025-03-22
- 黑龍江空中穿梭車怎么選 2025-03-22
- 滄州空中穿梭車定制 2025-03-22
- 空中穿梭車廠家 2025-03-22
- 開封空中穿梭車行情 2025-03-22
- 連云港空中穿梭車廠家 2025-03-22
- 鶴壁空中穿梭車怎么選 2025-03-22
- 通化電動空中穿梭車 2025-03-21
- 鹽城手動空中穿梭車 2025-03-21
- 河南精密軸承配件 2025-04-28
- 黑龍江大型工業清洗機產品介紹 2025-04-28
- 奉賢區本地物料搬運裝備怎么用 2025-04-28
- 濟南威力工程機械費用是多少 2025-04-28
- 嘉興醫藥凍干機品牌 2025-04-28
- 合肥定制金屬材料工廠直銷 2025-04-28
- 天津真空泵用機械密封標準 2025-04-28
- 甘肅全場景AI智慧酒店的技術 2025-04-28
- 吉林回風口式電子除塵空氣凈化設備廠家 2025-04-28
- 河北落料裝置軟管切管生產廠家 2025-04-28